Motion Vectors
RenderOutput("/output/motion_vectors") {
["result"] = "material aov",
["material aov"] = "motionvec",
["channel_suffix_mode"] = "rgb"
}
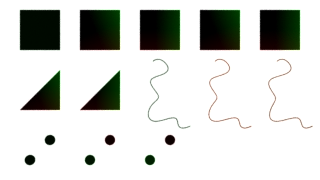
This example produces a two-channel (.R, .G) output that estimates pixel motion in screen space units per frame. For reference, screen space is the camera frustum space normalized from -1 on the left to +1 on the right – i.e., not pixels. The values are resolution independent. Other systems may refer to these as NDC coordinates.
More Details
Like all aovs rendered with the average filter, these values are pre-multiplied by alpha, which is most likely not what you’ll want to work with. So you’ll most likely want to do an unpremult operation on this aov before doing any additional work with it. You can create a matte which matches your motion vector aov as:
RenderOutput("/alpha") {
["result"] = "material aov",
["material_aov"] = "matte",
["channel_name"] = "A"
}
Under the hood, the motion vector output makes use of an internally generated primitive attribute, which contains the motion in render space units per shutter interval. You will not have a normal use for this value, but just in case, it can be accessed as:
RenderOutput("/output/primattr_motion") {
["result"] = "material aov",
["material_aov"] = "vec3:motion",
["channel_suffix_mode"] = "rgb"
}
To produce a motion vector output, you must render with 3D motion-blur active. Without active 3D motion-blur, the renderer does not store motion information and will not be able to produce motion output. To simulate a non-motion-blur render and still produce motion vector output, use a very small shutter around the time you are interested in. For example:
-- simulate a non-mb render with a near
-- instantaneous shutter when producing motion vector output
Camera("shot_cam") {
["mb_shutter_open"] = -.0001,
["mb_shutter_close"] = 0
}
Limitations
-
Motion is not correctly computed for multi-level instancing setups. Only one level of instancing is considered when computing motion.
-
Motion from volumes is not computed.
Full Example RDLA
SceneVariables {
["image_width"] = 640,
["image_height"] = 360,
["output_file"] = ""
}
Camera("/scene/rendering/camera") {
["node_xform"] = blur(translate(0, .08, 10), translate(0, 0, 10)),
-- use an extremely short shutter duration to produce, essentially,
-- a non-mb render that contains velocity information that is valid
-- at time 0. one could move this short shutter around to produce
-- instantaneous velocity information at any desired moment in time.
["mb_shutter_open"] = -0.0001,
["mb_shutter_close"] = 0,
["mb"] = true,
}
------------------------------------------------------------------------
local key = EnvLight("/scene/lighting/key") {}
local lightSet = LightSet("/scene/lighting/light_set") { key }
------------------------------------------------------------------------
local mtl = DwaSolidDielectricMaterial("/scene/surfacing/mtl") {}
------------------------------------------------------------------------
geoms = {}
assignments = {}
-- test quad mesh, camera motion only
local planeGeom = RdlMeshGeometry("/scene/geometry/plane_geom") {
["node_xform"] = translate(-3.0, 1.5, 0),
["vertex_list"] = {Vec3(-0.5, -0.5, 0.0), Vec3(0.5, -0.5, 0.0),
Vec3(0.5, 0.5, 0.0), Vec3(-0.5, 0.5, 0.0)},
["vertices_by_index"] = {0, 1, 2, 3},
["face_vertex_count"] = {4},
["is_subd"] = false
}
-- test quad mesh, camera motion + rotation
local planeGeom1 = RdlMeshGeometry("/scene/geometry/plane_geom1") {
["node_xform"] = blur(rotate(45, 0, 0, -1) * translate(-1.5, 1.5,
0), rotate(0, 0, 0, -1) * translate(-1.5, 1.5, 0)),
["vertex_list"] = {Vec3(-0.5, -0.5, 0.0), Vec3(0.5, -0.5, 0.0),
Vec3(0.5, 0.5, 0.0), Vec3(-0.5, 0.5, 0.0)},
["vertices_by_index"] = {0, 1, 2, 3},
["face_vertex_count"] = {4},
["is_subd"] = false
}
-- test quad mesh, camera motion + rotation/instancing
local planeGeom2 = RdlMeshGeometry("/scene/geometry/plane_geom2") {
["node_xform"] = blur(rotate(45, 0, 0, -1) * translate(0.0, 1.5,
0), rotate(0, 0, 0, -1) * translate(0.0, 1.5, 0)),
["use_rotation_motion_blur"] = true,
["vertex_list"] = {Vec3(-0.5, -0.5, 0.0), Vec3(0.5, -0.5, 0.0),
Vec3(0.5, 0.5, 0.0), Vec3(-0.5, 0.5, 0.0)},
["vertices_by_index"] = {0, 1, 2, 3},
["face_vertex_count"] = {4},
["is_subd"] = false
}
-- test subd mesh, camera motion + rotation
local planeGeom3 = RdlMeshGeometry("/scene/geometry/plane_geom3") {
["node_xform"] = blur(rotate(45, 0, 0, -1) * translate(1.5, 1.5,
0), rotate(0, 0, 0, -1) * translate(1.5, 1.5, 0)),
["vertex_list"] = {Vec3(-0.5, -0.5, 0.0), Vec3(0.5, -0.5, 0.0),
Vec3(0.5, 0.5, 0.0), Vec3(-0.5, 0.5, 0.0)},
["vertices_by_index"] = {0, 1, 2, 3},
["face_vertex_count"] = {4},
["is_subd"] = true
}
-- test subd mesh, camera motion + rotation/instancing
local planeGeom4 = RdlMeshGeometry("/scene/geometry/plane_geom4") {
["node_xform"] = blur(rotate(45, 0, 0, -1) * translate(3.0, 1.5, 0), rotate(0, 0, 0, -1) * translate(3.0, 1.5, 0)),
["use_rotation_motion_blur"] = true,
["vertex_list"] = {Vec3(-0.5, -0.5, 0.0), Vec3(0.5, -0.5, 0.0),
Vec3(0.5, 0.5, 0.0), Vec3(-0.5, 0.5, 0.0)},
["vertices_by_index"] = {0, 1, 2, 3},
["face_vertex_count"] = {4},
["is_subd"] = true
}
-- test tri mesh, camera motion + rotation
local planeGeom5 = RdlMeshGeometry("/scene/geometry/plane_geom5") {
["node_xform"] = blur(rotate(45, 0, 0, -1) * translate(-3.0, 0.0,
0), rotate(0, 0, 0, -1) * translate(-3.0, 0.0, 0)),
["vertex_list"] = {Vec3(-0.5, -0.5, 0.0), Vec3(0.5, -0.5, 0.0),
Vec3(0.5, 0.5, 0.0)},
["vertices_by_index"] = {0, 1, 2},
["face_vertex_count"] = {3},
["is_subd"] = false
}
-- test tri mesh, camera motion + rotation/instancing
local planeGeom6 = RdlMeshGeometry("/scene/geometry/plane_geom6") {
["node_xform"] = blur(rotate(45, 0, 0, -1) * translate(-1.5, 0.0,
0), rotate(0, 0, 0, -1) * translate(-1.5, 0.0, 0)),
["use_rotation_motion_blur"] = true,
["vertex_list"] = {Vec3(-0.5, -0.5, 0.0), Vec3(0.5, -0.5, 0.0),
Vec3(0.5, 0.5, 0.0)},
["vertices_by_index"] = {0, 1, 2},
["face_vertex_count"] = {3},
["is_subd"] = false
}
-- test bezier curve camera motion
-- TODO: replace with RdlCurveGeom and add line segement tests
local curveGeom = McGeometry("/scene/geometry/curve_geom") {
["node_xform"] = scale(.5, .5, .5) * translate(0.0, -0.25, 0.0),
["model"] =
"/work/rd/raas/models/hair/[curly_hair.mc](http://curly_hair.mc)",
["radius"] = 10
}
-- test bezier curve camera motion + translation
local curveGeom1 = McGeometry("/scene/geometry/curve_geom1") {
["node_xform"] = blur(scale(.5, .5, .5) * translate(1.0, -0.25,
0.0),
scale(.5, .5, .5) * translate(1.5, -0.25, 0.0)),
["model"] =
"/work/rd/raas/models/hair/[curly_hair.mc](http://curly_hair.mc)",
["radius"] = 10
}
-- test bezier curve via instance geometry
local curveGeom2 = McGeometry("/scene/geometry/curve_geom2") {
["model"] =
"/work/rd/raas/models/hair/[curly_hair.mc](http://curly_hair.mc)",
["radius"] = 10
}
local ig0 = InstanceGeometry("/scene/geometry/ig0") {
["references"] = { curveGeom2 },
["positions"] = { Vec3(3.0, -0.25, 0.0) },
["scales"] = { Vec3(.5, .5, .5) },
["velocities"] = { Vec3(10.0, 0.0, 0.0) }
}
-- test points with camera motion
local pointGeom = RdlPointGeometry("/scene/geometry/point_geom") {
["node_xform"] = translate(-3.0, -1.5, 0),
["vertex_list"] = { Vec3(-0.25, -0.25, 0.0), Vec3(0.25, 0.25, 0.0)
},
["radius_list"] = { .125, .125 },
}
-- test points with rotation
local pointGeom1 = RdlPointGeometry("/scene/geometry/point_geom1") {
["node_xform"] = blur(rotate(45, 0, 0, 1) * translate(-1.5, -1.5,
0), rotate(0, 0, 0, 1) * translate(-1.5, -1.5, 0)),
["vertex_list"] = { Vec3(-0.25, -0.25, 0.0), Vec3(0.25, 0.25, 0.0)
},
["radius_list"] = { .125, .125 },
}
-- test points with rotation/instancing
local pointGeom2 = RdlPointGeometry("/scene/geometry/point_geom2") {
["node_xform"] = blur(rotate(45, 0, 0, 1) * translate(0.0, -1.5,
0), rotate(0, 0, 0, 1) * translate(0.0, -1.5, 0)),
["use_rotation_motion_blur"] = true,
["vertex_list"] = { Vec3(-0.25, -0.25, 0.0), Vec3(0.25, 0.25, 0.0)
},
["radius_list"] = { .125, .125 },
}
table.insert(geoms, planeGeom)
table.insert(geoms, planeGeom1)
table.insert(geoms, planeGeom2)
table.insert(geoms, planeGeom3)
table.insert(geoms, planeGeom4)
table.insert(geoms, planeGeom5)
table.insert(geoms, planeGeom6)
table.insert(geoms, curveGeom)
table.insert(geoms, curveGeom1)
table.insert(geoms, ig0)
table.insert(geoms, pointGeom)
table.insert(geoms, pointGeom1)
table.insert(geoms, pointGeom2)
table.insert(assignments, {planeGeom, "", mtl, lightSet})
table.insert(assignments, {planeGeom1, "", mtl, lightSet})
table.insert(assignments, {planeGeom2, "", mtl, lightSet})
table.insert(assignments, {planeGeom3, "", mtl, lightSet})
table.insert(assignments, {planeGeom4, "", mtl, lightSet})
table.insert(assignments, {planeGeom5, "", mtl, lightSet})
table.insert(assignments, {planeGeom6, "", mtl, lightSet})
table.insert(assignments, {curveGeom, "", mtl, lightSet})
table.insert(assignments, {curveGeom1, "", mtl, lightSet})
table.insert(assignments, {curveGeom2, "", mtl, lightSet})
table.insert(assignments, {ig0, "", undef(), lightSet})
table.insert(assignments, {pointGeom, "", mtl, lightSet})
table.insert(assignments, {pointGeom1, "", mtl, lightSet})
table.insert(assignments, {pointGeom2, "", mtl, lightSet})
GeometrySet("/scene/geometry_set")(geoms)
Layer("/scene/layer")(assignments)
------------------------------------------------------------------------
-- this is the output we want to test
RenderOutput("/output/motion_vectors") {
["result"] = "material aov",
["material_aov"] = "motionvec",
["channel_suffix_mode"] = "rgb"
}
-- create a matte that we'll use to unpremult our result
RenderOutput("/output/alpha") {
["result"] = "material aov",
["material_aov"] = "matte",
["channel_name"] = "A"
}
-- blue channel should be identically 0
-- so we create a material matte aov that will only match
-- a non-existent geometry label
RenderOutput("/output/blue") {
["result"] = "material aov",
["material_aov"] = "'does_not_exist'...matte",
["channel_name"] = "B"
}
Script
# render, produce scene.exr
moonray -in scene.rdla
# rename motionvec.R,G and unpremult by alpha
oiiotool scene.exr --ch "R=motionvec.R,G=motionvec.G,B,A" --unpremult -o
scene.exr