Arras Render
arras_render is a command-line and GUI tool for rendering scenes with MoonRay in a distributed single or multi-machine environment. It is a client application which connects to backend Arras computation processes. The arras_render client application does not do rendering on its own, rather it creates the scene information and sends that to backend computations. All rendering is performed on these backend computations using moonray and the rendered image is sent back to arras_render via socket communication. More detailed information can be found in the Arras overview documentation
There are three primary benefits to using this style of rendering:
- Lightweight code dependency
- The client application does not have a heavy dependency on moonray itself.
- The client only needs to think about a small set of dependencies.
- Scalability
- Performance can easily scale up by using more machines.
- The frontend process can be isolated from unexpected backend termination.
- Backend computations are separate processes, and so the frontend can restart backend to recover from any unexpected backend termination.
arras_render is a developer’s test tool of single and multi-machine distributed MoonRay rendering for interactive lighting sessions. It is a good code example of how to write an Arras MoonRay client. It takes in one or more input files using the --rdl option, the same as moonray, and when the render is complete the resulting image is written to disk. Note that the output image does not inculde all of the RenderOutput AOVS, but only the beauty and alpha.
Local mode
The frontend arras_render and the backend Arras computation process can be run on the same machine. This execution style is referred to as “Local” mode. In this mode, it is not needed to run the minicoord coordinator before starting arras_render. It is only needed to run the arras_render process, having established 3 environment variables:
export PATH=${rel_root}/bin:${PATH}
export RDL2_DSO_PATH=${rel_root}/rdl2dso.proxy
export ARRAS_SESSION_PATH=${rel_root}/sessions
arras_render --rdl <scene>.rdla --dc local --current-env
arras_render automatically boots the backend MCRT computations and connects to them. It is not necessary to specify -s or --session options, and arras_render automatically picks up “mcrt_progressive”. To make a specific configuration, create new sessiondef file based on mcrt_progressive.sessiondef and modify it.
Multi-machine mode
arras_render can be run at one host and can connect to multiple backend MCRT computations on other hosts. In this mode it is necessary to run the minicoord coordinator and manage multiple hosts before starting arras_render.
Three different computations are needed for multi-machine mode: “dispatch”, “mcrt”, and “merge”. The rendering task is done by the mcrt computation, and multiple mcrt computations can be used. There are many variations on how to configure dispatch, mcrt and merge computation across multiple hosts.
This is a simple multi-node example with two mcrt computations, using 3 hosts in total; hostA and hostB for the mcrt computations, and hostC for the dispatch and merge computations. Additional client hosts will be needed as well.
In this example, each host has 96 hyperthreaded cores:
- Assign an mcrt computation each to hostA and hostB.
- Assign all free cores to each mcrt computation by setting maxCores = *.
- Assign a dispatch computation and merge computation to hostC.
- This is a naive configuration and hostC is more lightweight than hostA and hostB.
- The dispatch computation only needs a single core (the default is 1 core)
- Assigning the remainder of the cores to the merge computations is desired.
In this example, we assign 94 cores to the merge computation
94 (for merge) + 1 (for dispatch) + 1 (for arras-foundation) = 96 cores.
This is an example sessiondef file for the above configuration.
{
"name": "mcrt_progressive_n_sample",
"computations": {
"(client)": {
"messages": {
"merge": "*"
}
},
"dispatch": {
"entry": "yes",
"dso": "libcomputation_progmcrt_dispatch.so",
"continuous": "false",
"fps": 1,
"numMachines": "$arrayNumber.mcrt",
"requirements": {
"computationAPI": "4.x",
"context":"arras_moonray"
},
"messages": {
"(client)": {
"accept": [
"RDLMessage",
"GenericMessage",
"ViewportMessage",
"JSONMessage",
"RenderSetupMessage"
]
},
"merge": { "accept": ["GenericMessage"] }
}
},
"mcrt": {
"arrayExpand": 2,
"dso": "libcomputation_progmcrt.so",
"fps": 12,
"machineId": "$arrayIndex",
"numMachines": "$arrayNumber",
"packTilePrecision": "auto16",
"enableDepthBuffer": true,
"requirements": {
"computationAPI": "4.x",
"context":"arras_moonray",
"resources": {
"maxCores": "*",
"minCores": 1.0,
"memoryMB": 16384
}
},
"messages": {
"(client)": {
"accept": [
"GenericMessage",
"ViewportMessage"
]
},
"dispatch": "*",
"merge": {
"accept": [
"GenericMessage",
"CreditUpdate"
]
}
}
},
"merge": {
"dso": "libcomputation_progmcrt_merge.so",
"fps": 1,
"numMachines": "$arrayNumber.mcrt",
"packTilePrecision": "auto16",
"requirements": {
"computationAPI": "4.x",
"context":"arras_moonray",
"resources": {
"maxCores": "*",
"minCores": 1.0
}
},
"messages": {
"(client)": {
"accept": [
"GenericMessage",
"ViewportMessage",
"CreditUpdate"
]
},
"mcrt": {
"accept": [
"PartialFrame",
"ProgressiveFrame",
"GenericMessage",
"JSONMessage"
]
},
"dispatch": "GenericMessage"
}
}
}
}
Example Notes
In the above example sessiondef file, look at the “requirements” object of “dispatch”, “mcrt”, and “merge”. Note that “dispatch” does not have “resources” defined in its “requirements” object, which means the default setting of all resources is used for “dispatch”.
This same sessiondef file can be used for from 32 to 96 HTcores machines, and it may also be OK for more than 96HTcores machine.
Additionally, in the usual case the merge computation is not a computational bottleneck if the mcrt total is not too high; around 6 or less. This means that not so many cores are needed for the for merge computation. However, the merge computation may become a bottleneck if the mcrt total is 32 or more configurations, for example. In this case, it would be better to assign as many cores as possible to the merge computation under extreme configuration.
The “message” object of “dispatch”, “mcrt”, and “merge” is not dependent on the mcrt total number. The example “message” object definition in the above example is recommended for all multi-machine configurations.
In order to run arras_render in multi-machine mode, the typical procedure looks like the following.
- Run minicoord on the client host.
- Run arras4_node on hostA, hostB, and hostC.
- On the client hosts, set 3 environment variables and run arras_render as follows:
export PATH=${rel_root}/bin:${PATH}
export RDL2_DSO_PATH=${rel_root}/rdl2dso.proxy
export ARRAS_SESSION_PATH=${rel_root}/sessions
arras_render --host <minicoord-running-host> --port 8888 --rdl <scene.rdla> -s <sessiondef-name> --num-mcrt 2 --current-env
In this example, the -s setting specified the sessiondef file name, but without the extension “.sessiondef”. The sessiondef file should be located in ${rel_root}/sessions/.
Additionally the --num-mcrt setting overwrites the “arrayExpand” field of “mcrt” object. So this sessiondef file can be used with other --num-mcrt numbers as well.
Multiple --rdl options can be set as well. arras_render reads multiple rdl files in the order specified.
Scene Data for Multi-machine rendering
There are two important rules to understand for multi-machine rendering.
The first one is related to the remote disk mount on the backend hosts.
SceneContext data is created at the client process and then sent to the backend computation via message. Backend computations receive the message and try to reconstruct scenes based on the received message data. If the received message includes separate data located on the server and pointed by a filename path, for example, then the backend computation needs to open that file properly based on the filename path. In order to do this, all the data needs to be located at the same location from all the backend computations. This is easy to achieve by locating the data to a remote disk which is mounted to each host with the same name. For example, scene data is saved on to a remote disk which is mounted to /work/scene on each host. With this example environment, all backend computations can access the destination data using the same filename path.
The next rule is to use an absolute path for file information in your scene and to NOT use a relative path. If a relative path like “./geomA” is in the scene, the backend computation will try to to open the file using “./geomA”. However, it’s likely that the current directory is not the same and therefore the backend computation cannot open the file and will fail. Therefore it’s recommended to use an absolute path for all filename information in the scene.
Characteristic of Moonray multi-machine rendering
The multi-machine implementation has several advantages, as follows.
- Each machine does not need to be synchronized to start the timing of rendering. Sometimes the boot timing of the backend computations are very different depending on each machine’s condition. The current multimachine implementation is very generous for boot backend timing differences. Faster booted computations will start rendering first and slower booted computation will join the later timing.
- Therefore it is possible to use mixed, heterogeneous environment with different machines of varying performance specifications for the backend computations. Arras achieves pretty much full utilization of computational resources for each backend MCRT computation even though each hardware performance is very different. It is not necessary to set up machines with the exact matching specifications.
- Rendering can be finished even if some of the backend MCRT computations fail or go inactive during rendering sessions.
- It is easy to achieve very scalable performance for the MCRT computation phase using multi-machine rendering.
In particular, in order to achieve good scalability through increased host count, the inter-communication time between backend MCRT computation is minimized.
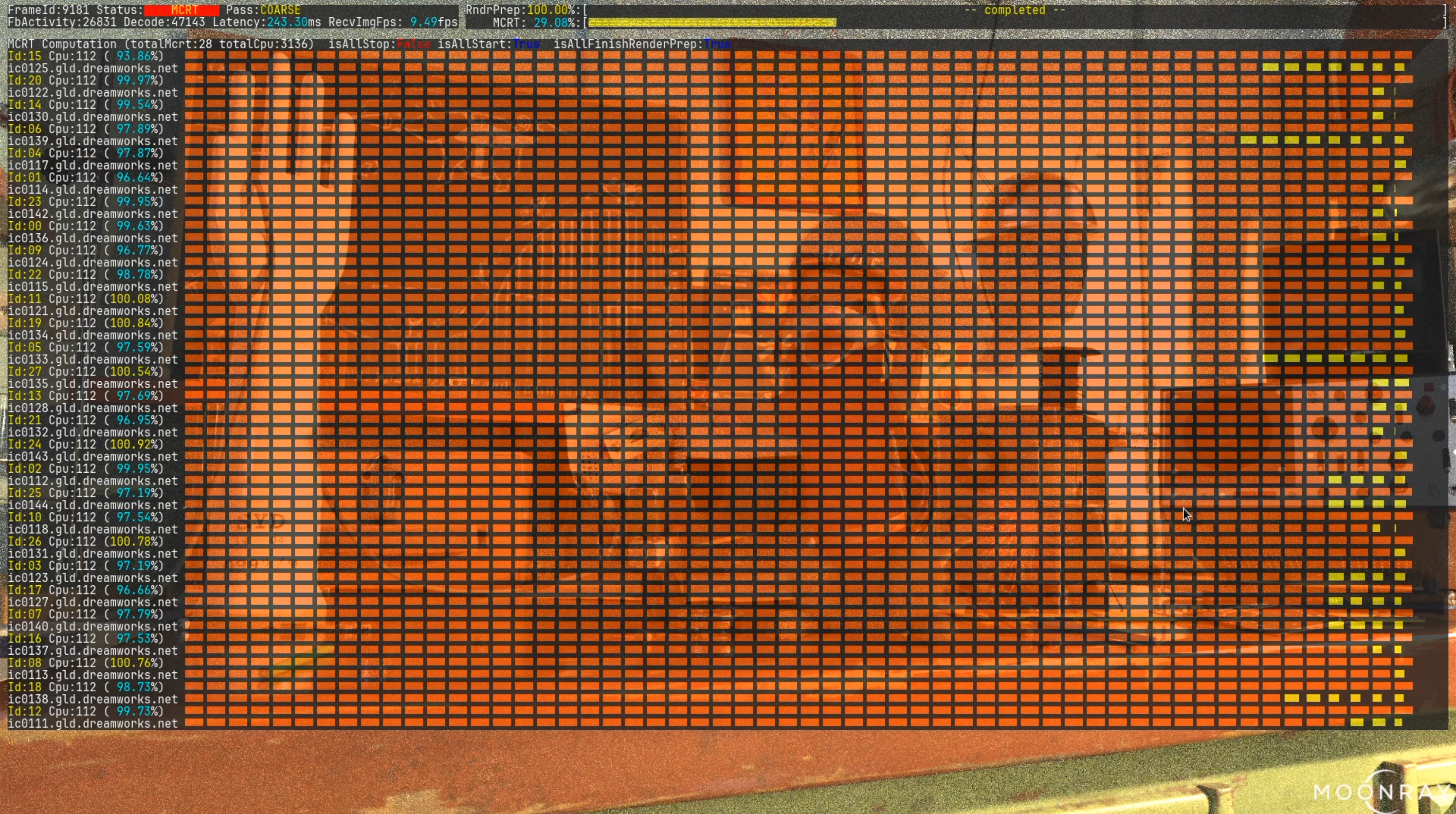
One of the important tasks is how to properly stop rendering under multiple machine configuration. The Merge computation needs to evaluate merged image results and analyze whether entire pixels have enough samples or not. Following that, the merge computation sends a stop render message to all MCRT computations if the resulting merged image already includes enough samples. Each MCRT computation then stops after receiving this STOP message from the merge computation. Usually, the MCRT computation needs some interval to stop after receiving the STOP message and this is depending on the timing of which phase of rendering MCRT is processing at that time. Therefore, it’s possible to see a greater than 100% final rendering progress percentage in some configurations and scenes. This overrun of progress percentage is related to the STOP logic of multi-machine implementation.
Note that this solution works well for uniform sampling but does not work well for adaptive sampling currently (and is being addressed in a future update). For the moment, it’s best to use uniform sampling if possible for multi-machine rendering.
Telemetry overlay
arras_render has a special runtime option to display the backend computation’s telemetry data to the screen. You can on/off this telemetry overlay at runtime.
Following are some examples of telemetry panels display.
 This is a core performance panel.
This is a core performance panel.
This functionality is pretty useful for understanding runtime backend computation’s status.
In order to use this functionality, we have to set a special environment variable to specify the font that is used for the telemetry overlay and this should be done before starting arras_render. This is done by setting up TELEMETRY_OVERLAY_FONTTTF as follows.
export TELEMETRY_OVERLAY_FONTTTF=<ttf file path>
You should set a monospaced font TTF filename for this value. for example
export TELEMETRY_OVERLAY_FONTTTF=~/fonts/ttf/JetBrainsMono-Regular.ttf
If you don’t specify any font TTF file, arras_render disables all telemetry overlay functionalities. If you specify the non-monospaced font to TELEMETRY_OVERLAY_FONTTTF, the telemetry overlay’s panel layout might be broken and it is not visually good in most cases.
The default status of the telemetry overlay is disabled even if you properly set up TELEMETRY_OVERLAY_FONTTTF environment variable. In order to enable, you need to use arras_render’s —-telemetry command line options or use HotKey f and g.
We have multiple overlay panels and they might be different variations depending on the OpenMoonRay versions.
Command-line options
Running arras_render without any command-line options will display the full list of options (including DWA-specific options which are not covered here).
The following described the options used with the minicoord environment and Local mode.
$ arras_render
At least one RDL file is required
--help produce help message
--dc arg (=gld)
--host arg ACAP host name, if unspecified ACAP will be
located using the studio's config service
--port arg (=8087) ACAP port number, ignored unless --host is
specified
-s [ --session ] arg Name of Arras session to use
-l [ --log-level ] arg (=2) Log level [0-5] with 5 being the highest
--gui Display frames in a gui window
--no-gui Disable gui
--overlay Display progress info in an overlay in the
gui window
--overlayFont arg (=Arial) Font to use when overlay is enabled
--overlaySize arg (=32) Font size to use when overlay is enabled
--telemetry Display telemetry info in an overlay in the
gui window
--rdl arg Path to RDL input file(s)
--exr arg Path to output EXR file
--num-mcrt arg (=1) Number of MCRT computations to use (implies
-s rdla_array).
--num-cores arg Overrides the number of cores requested by
the MCRT computation.
--merge-cores arg Overrides the number of cores requested by
the MERGE computation.
--fps arg Overrides the frame rate for the MCRT
computation.
--aov-interval arg (=10) Set the interval rate for sending AOVs, a
value of 0 disables this feature.
-t [ --con-timeout ] arg (=30) Amount of time in seconds to wait for
client connection.
--auto-credit-off disable sending out credit after each frame
is received
--trace-level arg (=0) trace threshold level (-1=none,5=max)
--min-update-ms arg (=0) minimum camera update interval
(milliseconds)
--infoRec arg (=0) infoRec interval (sec). disable if set 0.0
--infoRecDisp arg (=10) infoRec display interval (sec)
--infoRecFile arg (=./run_) set infoRec filename
--showStats Display clientReceiverFb's statistical info
to the cerr
--debug-console arg (=-1) specify debug console port.
--current-env Use current environment as computation
environment
The --dc local option is used for Local mode.
The --infoRec, --inforRecDisp, and --infoRecFile options are used for statistical information purposes.
The --debug-console option is designed for debugging purposes.
Mouse / Hotkey Operation
Left Mouse Button dragging rotates the camera direction. There is no orbit camera mode like moonray_gui at this moment.
| Key | Description |
|---|---|
q |
Slow down movement |
w |
Translate forward |
e |
Speed up movement |
r |
Reset camera to original start-up world location |
a |
Translate left |
d |
Translate right |
c |
Translate downward |
Space |
Translate upward |
f |
Telemetry overlay enable/disable toggle |
g |
Switch telemetry overlay panel type |
n |
Denoise on/off toggle |